
11-б. Нитяной и пружинный маятники
§ 11-б. Нитяной и пружинный маятники
Познакомимся с физической моделью нитяной маятник.
Взгляните на рисунок. Вы видите кирпич, подвешенный на широкой ленте, и тяжёлый шарик, подвешенный на нити. Толкнём их рукой, и оба тела начнут совершать колебания – станутмаятниками. Изучить колебания – значит найти способы описания колебаний и выявить их закономерности. Удобен ли для этого кирпичный маятник? Конечно, нет.
Во-первых, потому, что он большой, и при его качаниях будет велика сила сопротивления воздуха.
Во-вторых, лента подвешена за два конца, и при качаниях её половины будут натягиваться неодинаково, из-за чего кирпич будет двигаться зигзагами. Тяжёлый шарик на нити более удобен для изучения колебаний.
Нитяным маятником
называют тело на невесомой нерастяжимой нити, совершающее колебания
Для этой модели важно, чтобы размеры тела были малы по сравнению с длиной нити
В таком случае говорят: формой и размерами тела можно пренебречь (то есть в данных условиях не принимать их во внимание). Опыты показывают: если на тело нитяного маятника действуют только сила тяжести и сила упругости, он совершает колебания с постоянным периодом
При этом, если амплитуда колебаний невелика по сравнению с длиной нити (говорят: маятник совершает малые колебания), то период колебаний нитяного маятника можно подсчитать по формуле, которая помещена в рамке.
Вы видите, что период малых колебаний нитяного маятника не зависит от его массы, а определяется лишь длиной нити l и коэффициентом g.
Например, при увеличении длины нити в 4 раза, период колебаний маятника возрастёт в 2 раза (что равно √4 раз).
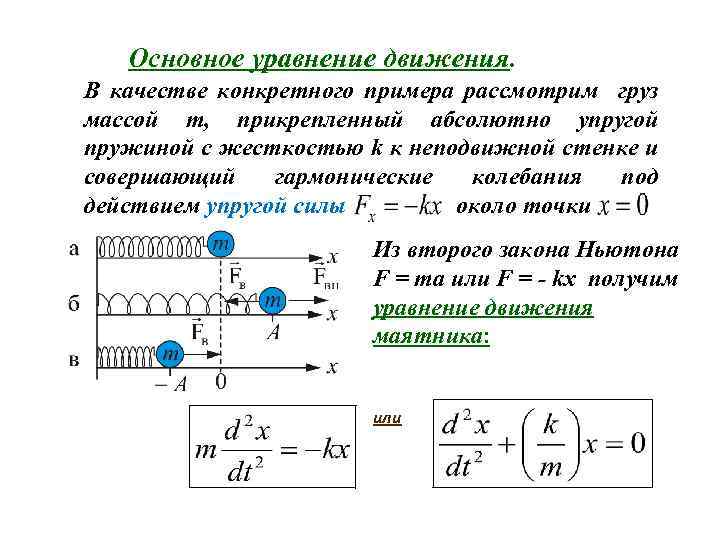
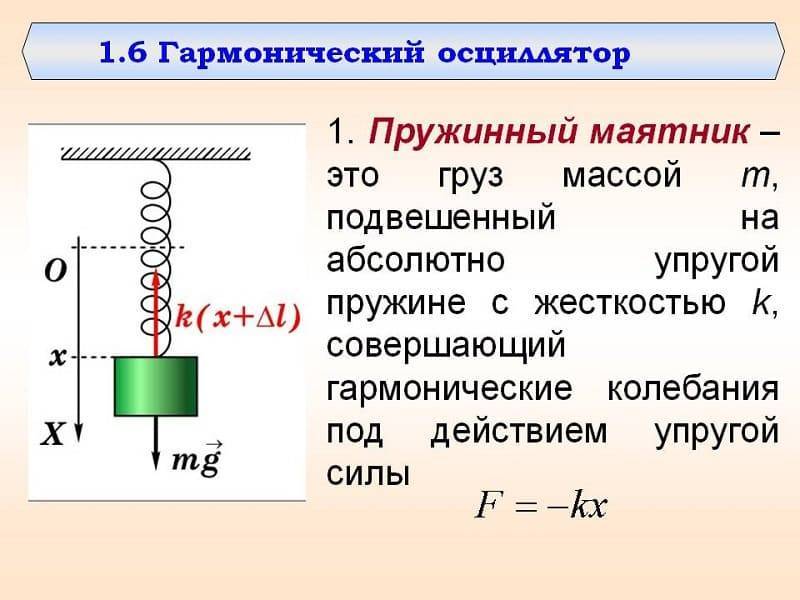
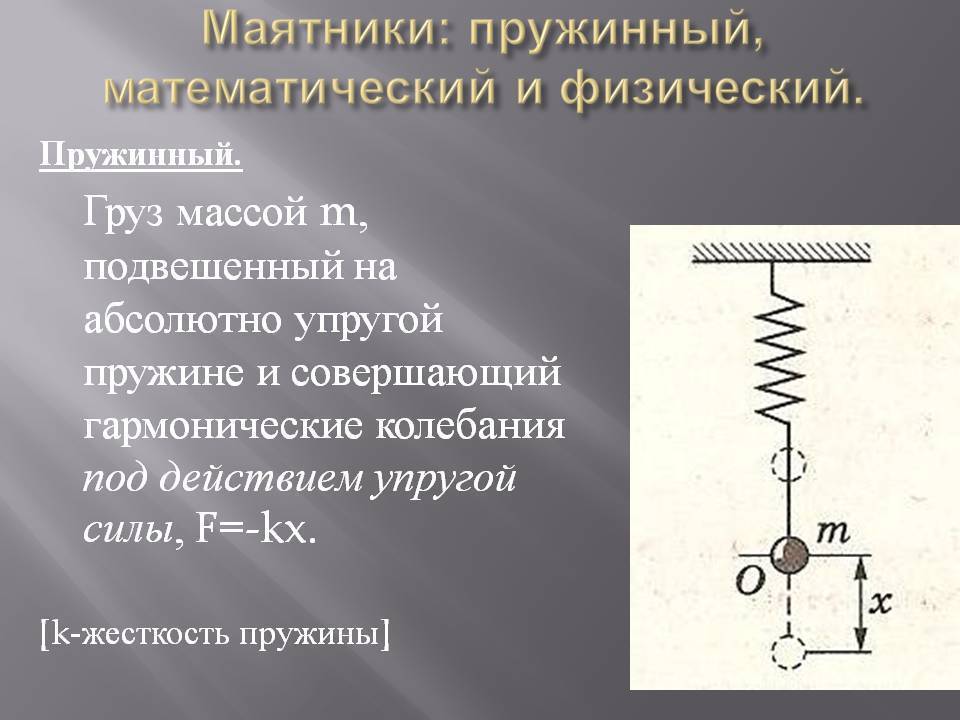
Рассмотрим вторую модель: пружинный маятник
– тело на пружине, совершающее колебания
При этом важно, чтобы один конец пружины был закреплён, а её масса была мала по сравнению с массой тела (то есть массой пружины можно было бы пренебречь). Опыты показывают: если на тело пружинного маятника действуют только сила тяжести и сила упругости, он совершает колебания с постоянным периодом
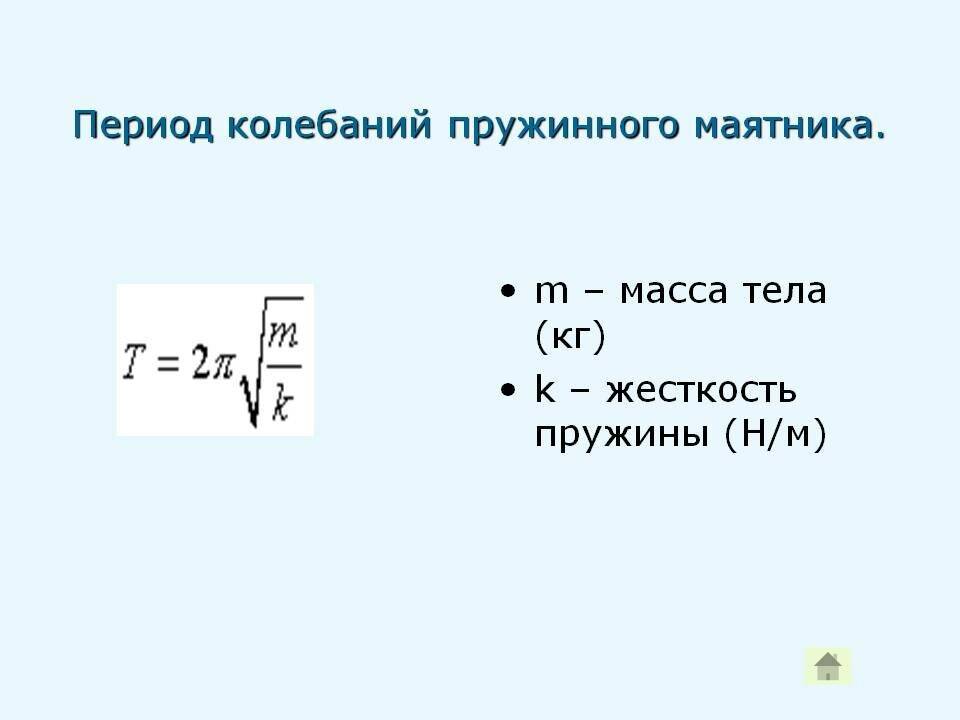
При этом, если амплитуда колебаний невелика по сравнению с длиной пружины (то есть она деформируется упруго), то период колебаний пружинного маятника можно подсчитать по формуле, которая помещена в рамке.
Итак, период малых колебаний пружинного маятника не зависит от коэффициента силы тяжести, а определяется лишь массой тела m и коэффициентом k, характеризующим жёсткость пружины.
Например, при увеличении массы груза в 9 раз, период колебаний маятника возрастёт в 3 раза (что равно √9 раз).
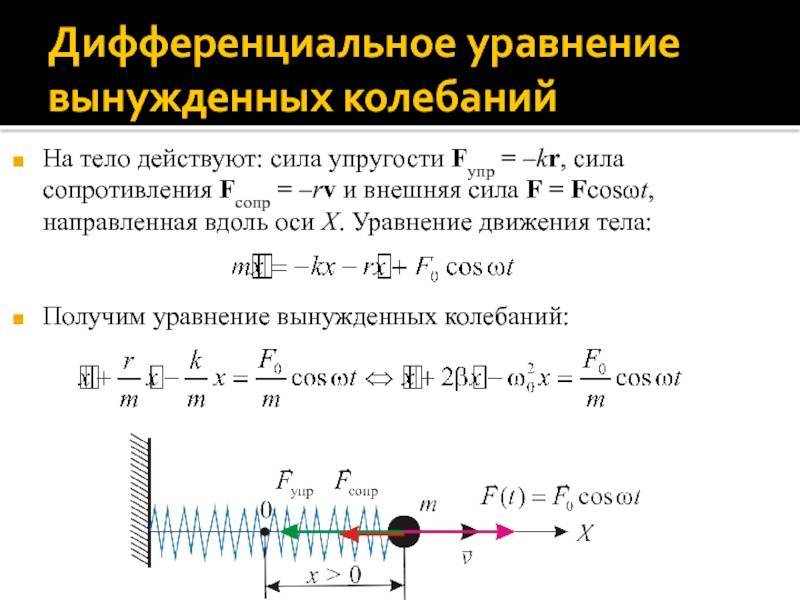
Наряду со свободными колебаниями,
когда маятник выведен из положения равновесия и предоставлен самому себе, существуют такжевынужденные колебания иавтоколебания. Обратимся к рисунку.
Под гирей, висящей на пружине, расположен электромагнит.
Если мы будем попеременно включать и выключать ток, то гиря начнёт совершать вынужденные колебания,
частота которых зависит от частоты внешнего воздействия.
Однако маятник может сам регулировать поступление энергии, совершая автоколебания.
Взгляните: средний провод зажат прищепкой и касается гири, пока она вверху.
Ток, проходя через пружину, гирю, средний провод и электромагнит, намагничивает его сердечник. Притягиваясь, гиря движется вниз. Вскоре она отсоединяется от среднего провода, ток прекращается, и магнитное поле исчезает.
Под действием пружины гиря поднимается вверх и снова замыкает цепь.
Колебательные и волновые явленияФормулы Физика Теория 8 класс
Не можешь написать работу сам?
Доверь её нашим специалистам
от 100 р.
стоимость заказа
Если материал понравился Вам и оказался для Вас полезным, поделитесь им со своими друзьями!
смещение положения равновесия точки
смещение положения равновесия точки
Задача 40713
Написать уравнение синусоидального гармонического колебания, если амплитуда скорости 63 см/с, период колебаний 1 с, смещение точки от положения равновесия в начальный момент времени равно нулю. Найти амплитуду ускорения, частоту колебаний.
Задача 40738
Написать уравнение гармонического колебания, совершаемого по закону косинуса, если амплитуда ускорения 50 см/с2, частота колебаний 50 Гц, смещение точки от положения равновесия в начальный момент времени 25 мм. Найти амплитуду скорости.
Задача 40739
Написать уравнение гармонического колебания, совершаемого по закону косинуса, если амплитуда ускорения 50 м/с2, частота колебаний 50 Гц, смещение точки от положения равновесия в начальный момент времени 0,25 мм. Найти амплитуду скорости.
Задача 26216
Написать уравнение гармонических колебаний с амплитудой 50мм, периодом 4с и начальной фазой П/4. Найти смещение точки от положения равновесия при t = 0 и t = 1,5 с.
Задача 26560
Уравнение незатухающих колебаний дано в виде: У = 4 ·10–2cos6πt, м. Найти смещение от положения равновесия точки, находящейся на расстоянии 75 см от источника колебаний через 0,01 с после начала колебаний. Скорость распространения колебаний 340 м/с.
Задача 11103
Напишите уравнение гармонического колебания, если амплитуда скорости vm = 63 см/с, период колебаний Т = 1 с, смещение точки от положения равновесия в начальный момент времени равно нулю. Найдите амплитуду ускорения и частоту колебаний. Постройте график зависимости смещения от времени.


Задача 12666
На каком ближайшем расстоянии от источника колебаний с периодом 45 мс через время, равное половине периода после включения источника смещение точки от положения равновесия равно половине амплитуды? Скорость распространения колебаний равна 158 м/с. Считать, что в момент включения источника все точки находятся в положении равновесия.
Задача 14576
Уравнение незатухающих колебаний х = 4sin(600πt) см. Найти смещение x от положения равновесия точки, находящейся на расстоянии l = 75 см от источника колебаний, для момента времени t = 0,01с после начала колебаний. Скорость распространения колебаний v = 300 м/с.
Задача 14932
Плоская монохроматическая волна распространяется вдоль оси Y. Амплитуда волны А = 0,05 м. Считая, что в начальный момент времени смещение точки Р, находящейся в источнике, максимально, определить смещение от положения равновесия точки М, находящейся на расстоянии у = λ/2 от источника колебаний в момент времени t = T/6.
Задача 15330
Смещение от положения равновесия точки, находящейся на расстоянии 4 см от источника колебаний, в момент времени Т/6 равно половине амплитуды. Найти длину бегущей волны.
Задача 17372
Начальная фаза гармонического колебания ψ = 0. При смещении точки от положения равновесия х1 = 2,4 см скорость точки v1 = 3 см/с, а при смещении х2 = 2,8 см ее скорость v2 = 2 см/с. Найти амплитуду А и период Т этого колебания.
Задача 19324
На каком расстоянии от источника колебаний, совершаемых по закону синуса, в момент времени t = T/2 смещение точки от положения равновесия равно половине амплитуды? Скорость распространения колебаний 340 м/с. Период колебаний 10–3 с.
Задача 19326
Источник плоских волн совершает колебания по закону x = A cos ωt. Через четверть периода после начала колебаний смещение от положения равновесия точки, находящейся на расстоянии 4 см от источника, равно половине амплитуды. Найти длину бегущей волны.
Задача 19327
Источник плоских волн совершает колебания по закону x = A cos ωt. Какова амплитуда колебаний, если смещение от положения равновесия точки, отстоящей от источника на расстоянии λ/12 для момента времени T/4, равно 0,025 м?
Задача 20380
Определить начальную фазу колебаний, которые происходят по закону косинуса, если максимальная скорость равна 16 см/с, период колебаний 1,4 с, а смещение точки от положения равновесия в начальный момент времени составляет 2,84 см.
Темы по физике
- Механика (56)
- Кинематика (19)
- Динамика и статика (32)
- Гидростатика (5)
- Молекулярная физика (25)
- Уравнение состояния (3)
- Термодинамика (15)
- Броуновское движение (6)
- Прочие формулы по молекулярной физике (1)
- Колебания и волны (22)
- Оптика (9)
- Геометрическая оптика (3)
- Физическая оптика (5)
- Волновая оптика (1)
- Электричество (39)
- Атомная физика (15)
- Ядерная физика (3)
Темы по математике
- Квадратный корень, рациональные переходы (1)
- Квадратный трехчлен (1)
- Координатный метод в стереометрии (1)
- Логарифмы (1)
- Логарифмы, рациональные переходы (1)
- Модуль (1)
- Модуль, рациональные переходы (1)
- Планиметрия (1)
- Прогрессии (1)
- Производная функции (1)
- Степени и корни (1)
- Стереометрия (1)
- Тригонометрия (1)
- Формулы сокращенного умножения (1)
Колебания и частота
Процедура, связанная с изменением положения системы рядом с точкой равновесного состояния и повторяющаяся с течением времени, называется колебаниями. Качающийся маятник повторяет свои движения относительно нормали к горизонтальной плоскости. При этом, если не прикладывать к его движению дополнительной энергии, его раскачивания затухнут.
Явление таких изменений можно классифицировать по следующим параметрам:
- по математической модели, используемой в колебаниях;
- по структуре периодичности;
- по природе физических свойств;
- по виду взаимодействия с окружающими условиями.
Внимание! Все колебания, независимо от своих физических свойств, имеют общие законы, которые можно описать волновыми явлениями. Эти закономерности исследует теория волновых колебаний
Механические колебания связаны с трансформацией одной формы энергии в другую, волновые – с пространственным передвижением и распространением энергии.
Общими параметрами для всех колебаний являются:
- частота;
- период;
- амплитуда.
Частотой считают количество колебаний, совершаемых телом за единицу времени. Единица измерения – герц (Гц), графическое обозначение – f, ʋ. Частота может быть круговой – при периодичном движении точки по окружности, ещё её называют циклической:
ω = 2π*T, (рад/с).
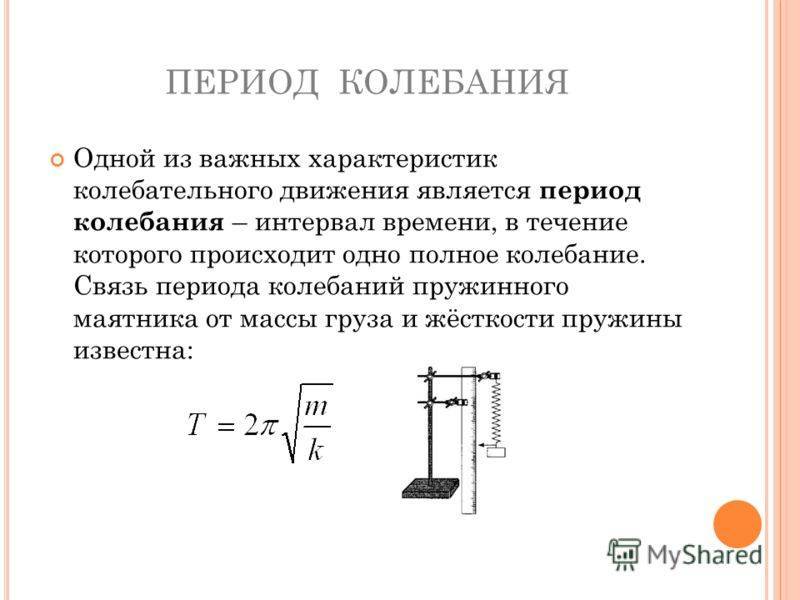
Период (T) являет собой время целого (полного) колебания, во время которого можно зафиксировать повторение любой из характеристик состояния системы. Это значит, что она совершила полное колебание. Обозначение периода – Т, единица измерения – секунда (с).
Две величины T и f являются обратными, что следует из формул:
- T = 1/f;
- f = 1/T.
Наибольшее отклонение точки тела или любой величины системы от равновесного положения называется амплитудой колебаний и обозначается буквой A. Единицей измерения являются те величины, изменения которых рассматриваются. При механических отклонениях амплитуду измеряют в метрах (м), амплитуду переменного напряжения – в вольтах (В) и так далее.
Период и частота механических колебаний
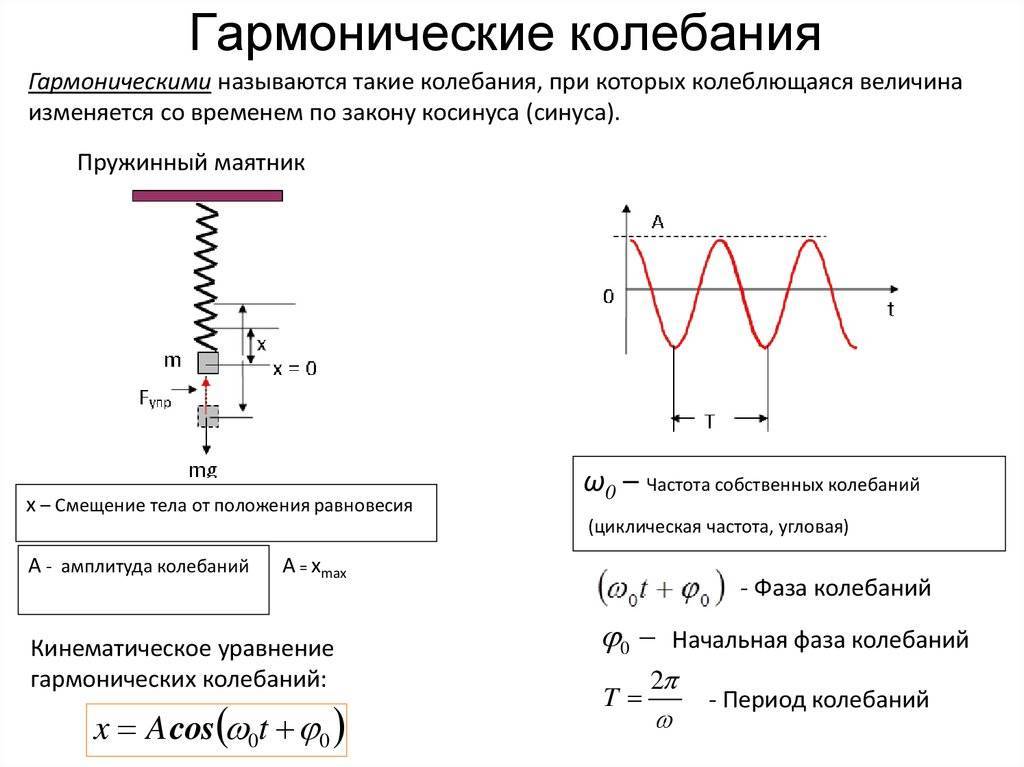
Гармонические колебания
Гармонические колебания – простейшие периодические колебания, при которых координата тела меняется по закону синуса или косинуса:
где \( x \) – координата тела – смещение тела от положения равновесия в данный момент времени; \( A \) – амплитуда колебаний; \( \omega t+\varphi_0 \) – фаза колебаний; \( \omega \) – циклическая частота; \( \varphi_0 \) – начальная фаза.
Если в начальный момент времени тело проходит положение равновесия, то колебания являются синусоидальными.
Если в начальный момент времени смещение тела совпадает с максимальным отклонением от положения равновесия, то колебания являются косинусоидальными.
Скорость гармонических колебаний Скорость гармонических колебаний есть первая производная координаты по времени:
где \( v \) – мгновенное значение скорости, т. е. скорость в данный момент времени.
Амплитуда скорости – максимальное значение скорости колебаний, это величина, стоящая перед знаком синуса или косинуса:
Ускорение гармонических колебаний Ускорение гармонических колебаний есть первая производная скорости по времени:
где \( a \) – мгновенное значение ускорения, т. е. ускорение в данный момент времени.
Амплитуда ускорения – максимальное значение ускорения, это величина, стоящая перед знаком синуса или косинуса:
Если тело совершает гармонические колебания, то сила, действующая на тело, тоже изменяется по гармоническому закону:
где \( F \) – мгновенное значение силы, действующей на тело, т. е. сила в данный момент времени.
Амплитуда силы – максимальное значение силы, величина, стоящая перед знаком синуса или косинуса:
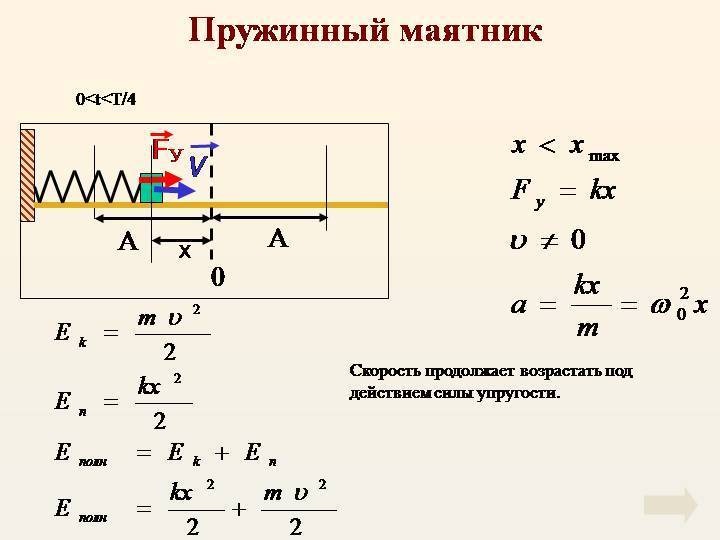
Тело, совершающее гармонические колебания, обладает кинетической или потенциальной энергией:
где \( W_k \) – мгновенное значение кинетической энергии, т. е. кинетическая энергия в данный момент времени.
Амплитуда кинетической энергии – максимальное значение кинетической энергии, величина, стоящая перед знаком синуса или косинуса:
При гармонических колебаниях каждую четверть периода происходит переход потенциальной энергии в кинетическую и обратно. В положении равновесия:
- потенциальная энергия равна нулю;
- кинетическая энергия максимальна.
При максимальном отклонении от положения равновесия:
- кинетическая энергия равна нулю;
- потенциальная энергия максимальна.
Полная механическая энергия гармонических колебаний При гармонических колебаниях полная механическая энергия равна сумме кинетической и потенциальной энергий в данный момент времени:
Важно! Следует помнить, что период колебаний кинетической и потенциальной энергий в 2 раза меньше, чем период колебаний координаты, скорости, ускорения и силы. А частота колебаний кинетической и потенциальной энергий в 2 раза больше, чем частота колебаний координаты, скорости, ускорения и силы
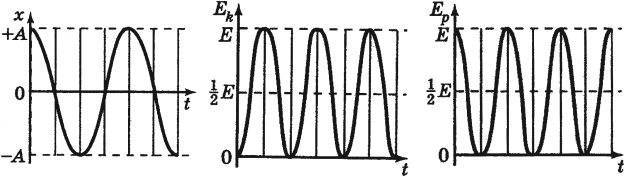
Графики зависимости кинетической, потенциальной и полной энергий всегда лежат выше оси времени.
Если сила сопротивления отсутствует, то полная энергия сохраняется. График зависимости полной энергии от времени есть прямая, параллельная оси времени (в отсутствие сил трения).




Формула для расчета периода колебаний пружинного маятника
- Механика (56)
- Кинематика (19)
- Динамика и статика (32)
- Гидростатика (5)
- Молекулярная физика (25)
- Уравнение состояния (3)
- Термодинамика (15)
- Броуновское движение (6)
- Прочие формулы по молекулярной физике (1)
- Колебания и волны (22)
- Оптика (9)
- Геометрическая оптика (3)
- Физическая оптика (5)
- Волновая оптика (1)
- Электричество (39)
- Атомная физика (15)
- Ядерная физика (3)
- Квадратный корень, рациональные переходы (1)
- Квадратный трехчлен (1)
- Координатный метод в стереометрии (1)
- Логарифмы (1)
- Логарифмы, рациональные переходы (1)
- Модуль (1)
- Модуль, рациональные переходы (1)
- Планиметрия (1)
- Прогрессии (1)
- Производная функции (1)
- Степени и корни (1)
- Стереометрия (1)
- Тригонометрия (1)
- Формулы сокращенного умножения (1)
Сообщение от администратора:
Ребята! Кто давно хотел выучить английский?Переходите по моей ссылке и получите два бесплатных урока в школе английского языка SkyEng! Занимаюсь там сам — очень круто. Прогресс налицо.
В приложении можно учить слова, тренировать аудирование и произношение.
Попробуйте. Два урока бесплатно по моей ссылке! Жмите СЮДА
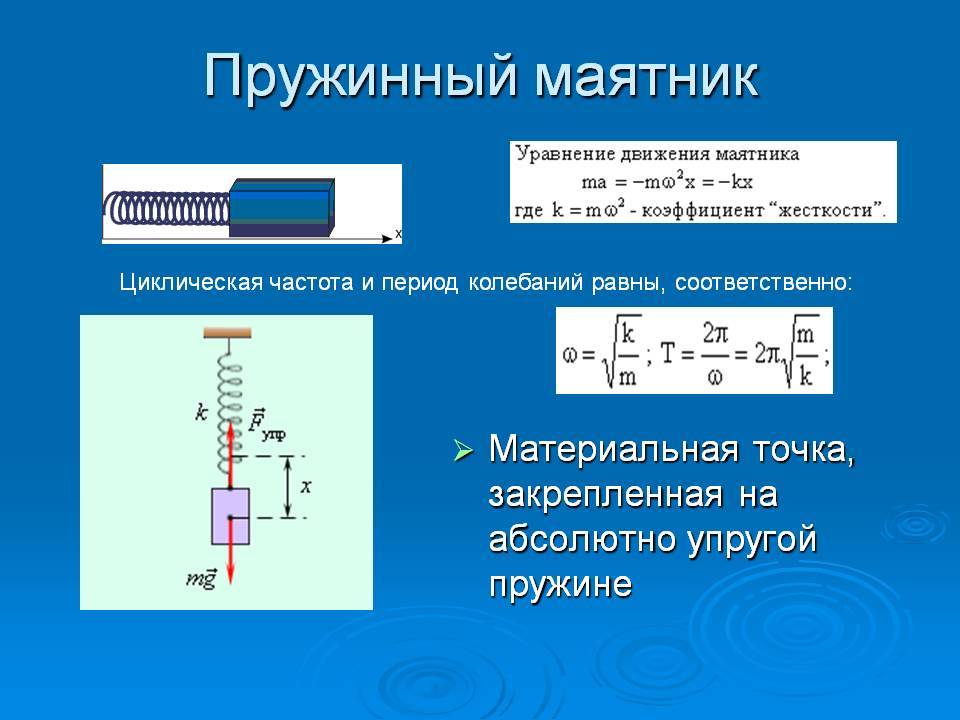
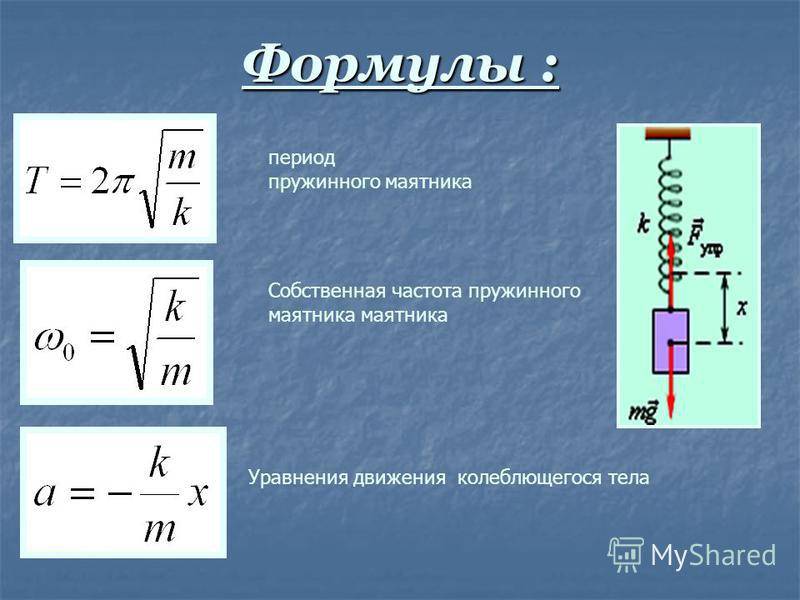
Период пружинного маятника — зависит от жёсткости пружины: с увеличением коэффициента жёсткости пружины период колебания маятника уменьшается
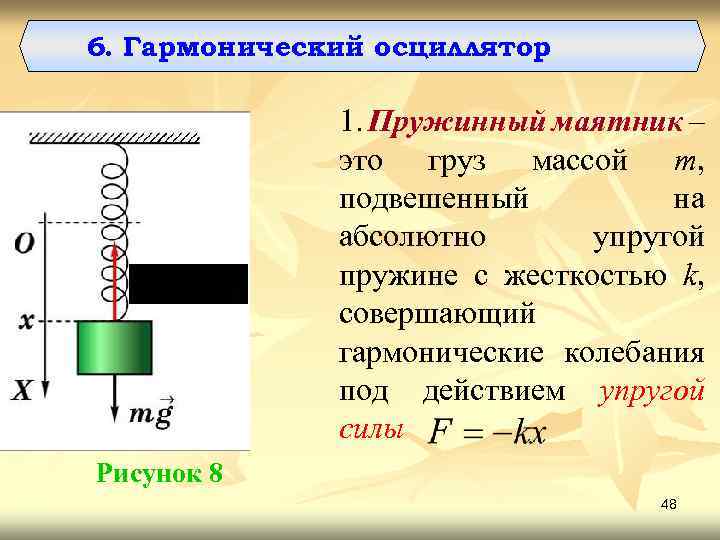
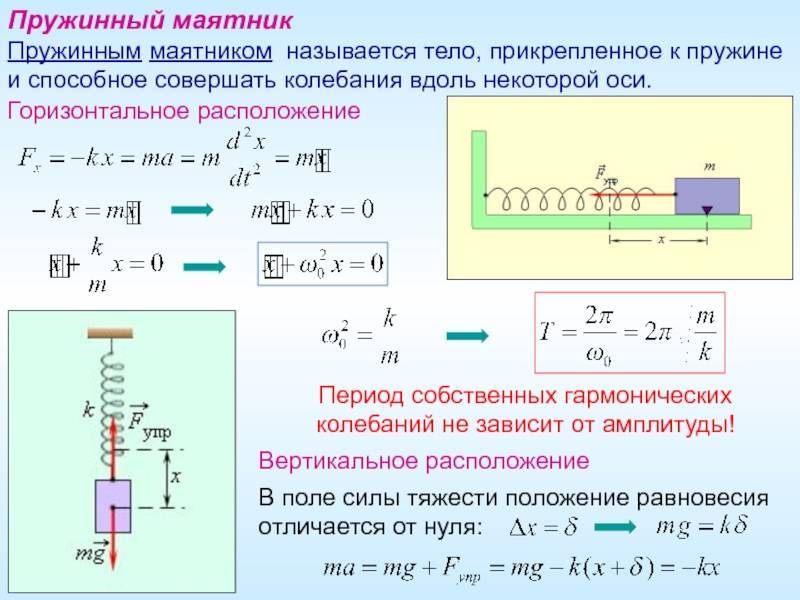
Пружинный маятник — это груз, колеблющийся на пружине. Он совершает возвратно-поступательное движение. Пружинный маятник подчиняется законам движения, по которым можно определить период его колебаний, зная массу груза и жесткость пружины. Период колебаний пружинного маятника не зависит от места его расположения и амплитуды колебаний.
Давайте выведем формулу периода пружинного маятника.

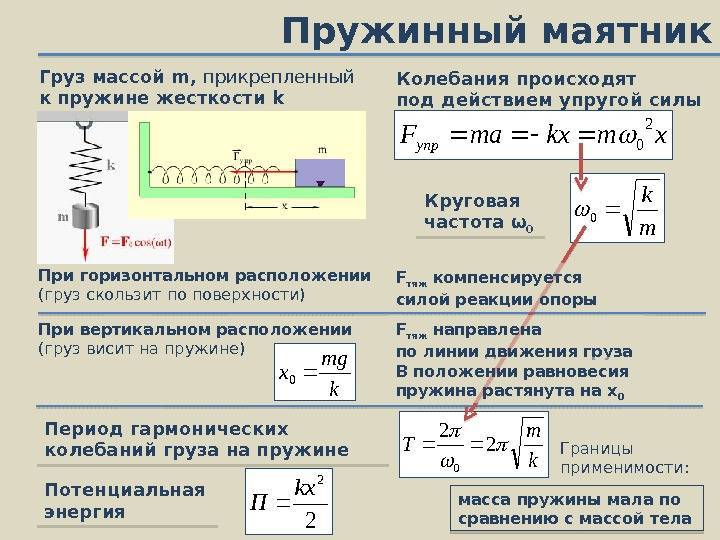
На груз m горизонтального пружинного маятника действуют сила тяжести (mg), сила реакции опоры (N) и сила упругости пружины (Fynp). Запишем второй закон Ньютона для данного случая :
Все проецируем на ось ОХ:
Запишем это уравнение в форме аналогичной уравнению движения гармонического осциллятора:
Сравнивая полученное выражение с уравнением гармонических колебаний у нас получается:
Из уравнения видно, что циклическая частота пружинного маятника будет иметь вид:
Тогда период колебаний пружинного маятника будет равен:
- Период физического маятника
- Период крутильного маятника
- В Формуле мы использовали :
- — Период пружинного маятника маятника
- — Масса груза
- — Изменение длины пружины
- — Коэффициент упругости пружины
- — Ускорение свободного падения
- — Циклическая частота пружинного маятника
- — Сила реакции опоры
- — Сила упругости
Формула периода колебаний пружинного маятника
- Период — это минимальное время, за которое совершается одно полное колебательное движение.
- Обозначают период буквой $T$.
- где $Delta t$ — время колебаний; $N$ — число полных колебаний.
Уравнение колебаний пружинного маятника
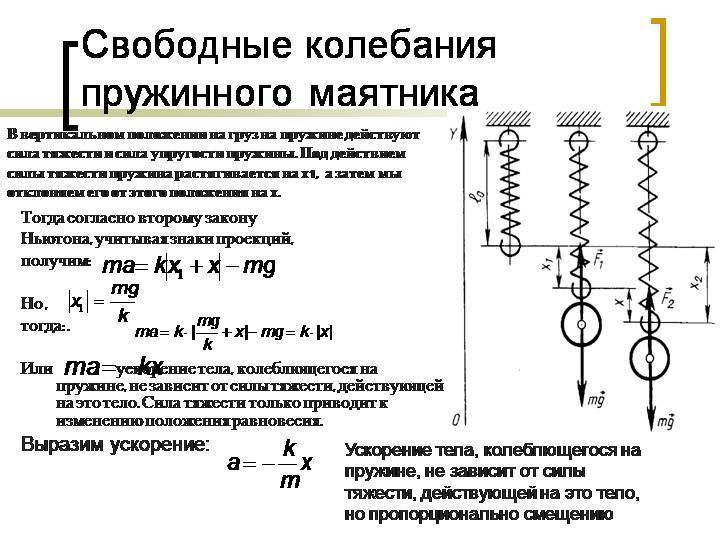
Рассмотрим простейшую колебательную систему, в которой можно реализовать механические колебания. Это груз массы $m$, подвешенный на пружине, коэффициент упругости которой равен $k $(рис.1).
Рассмотри вертикальное движение груза, которое обусловлено действием силы тяжести и силы упругости пружины. В состоянии равновесия такой системы, сила упругости равна по величине силе тяжести.
Допустим, что масса пружины мала в сравнении с массой груза, при описании колебаний ее учитывать не будем. Началом отсчета будем считать точку на оси координат (X), которая совпадает с положением равновесия груза. В этом положении пружина уже имеет удлинение, которое обозначим $b$. Растяжение пружины происходит из-за действия на груз силы тяжести, следовательно:
- Если груз смещают дополнительно, но закон Гука еще выполняется, то сила упругости пружины становится равна:
- Ускорение груза запишем, помня, что движение происходит по оси X, как:
- Второй закон Ньютона для груза принимает вид:
- Учтем равенство (2), формулу (5) преобразуем к виду:
- Если ввести обозначение: $^2_0=frac$, то уравнение колебаний запишем как:
- где $^2_0=frac$ — циклическая частота колебаний пружинного маятника. Решением уравнения (7) (это проверяется непосредственной подстановкой) является функция:
- где $_0=sqrt>0$- циклическая частота колебаний маятника, $A$ — амплитуда колебаний; $_0t+varphi )$ — фаза колебаний; $varphi $ и $_1$ — начальные фазы колебаний.
Сила упругости в пружинном маятнике
Следует учитывать тот момент, что до деформирования пружины она находится в положении равновесия. Приложенная сила может приводить к ее растягиванию и сжиманию. Сила упругости в пружинном маятнике рассчитывается в соответствии с тем, как воздействует закон сохранения энергии. Согласно принятым нормам возникающая упругость пропорциональна смещению тела. В этом случае кинетическая энергия рассчитывается по формуле: F=-kx. В данном случае применяется коэффициент жесткости пружины.
Выделяют довольно большое количество особенностей воздействия силы упругости в пружинном маятнике. Среди особенностей отметим:
- Максимальная сила упругости возникает на момент, когда тело находится на максимальном расстоянии от положения равновесия. При этом в подобном положении отмечается максимальное значение ускорение тела. Не следует забывать о том, что может проводится растягивание и сжатие пружины, оба варианта несколько отличается. При сжатии минимальная длина изделия ограничивается. Как правило, она имеет длину, равную диаметру витка умноженное на количество. Слишком большое усилие может стать причиной смещения витков, а также деформации проволоки. При растяжении есть момент удлинения, после которого происходит деформация. Сильное удлинение приводит к тому, что возникающей силы упругости недостаточно для возврата изделия в первоначальное состояние.
- При сближении тела к месту равновесия происходит существенное уменьшение длины пружины. За счет этого наблюдается постоянное снижение показателя ускорения. Все это происходит за счет воздействия усилия упругости, которая связано с типом применяемого материала при изготовлении пружины и ее особенностями. Длина уменьшается за счет того, что расстояние между витками снижается. Особенностью можно назвать равномерное распределение витков, лишь только в случае дефектов есть вероятность нарушения подобного правила.
- На момент достижения точки равновесия сила упругости снижается до нуля. Однако, скорость не снижается, так как тело движется по инерции. Точка равновесия характеризуется тем, что длина изделия в ней сохраняется на протяжении длительного периода при условии отсутствия внешнего деформирующего усилия. Точка равновесия определяется в случае построения схемы.
- После достижения точки равновесия возникающая упругость начинает снижать скорость перемещения тела. Она действует в противоположном направлении. При этом возникает усилие, которое направлено в обратную сторону.
- Дойдя крайней точки тело начинает двигаться в противоположную сторону. В зависимости от жесткости установленной пружины подобное действие будет повторятся неоднократно. Протяженность этого цикла зависит от самых различных моментов. Примером можно назвать массу тела, а также максимальное приложенное усилие для возникновения деформации. В некоторых случаях колебательные движения практически незаметны, но они все же возникают.
Приведенная выше информация указывает на то, что колебательные движения совершаются за счет воздействия упругости. Деформация происходит за счет приложенного усилия, которое может варьировать в достаточно большом диапазоне, все зависит от конкретного случая.
Постигаем закон Гука
Все объекты природы могут деформироваться, т.е. менять свою форму или объем, под действием приложенной силы. Если такие деформации (т.е. изменения) исчезают после прекращения действия приложенной силы, то они называются упругими. Упругость играет важную роль в технике. Упругие пружины используются для гашения удара при посадке космического корабля на поверхность планеты. Свернутые в спираль упругие пластины применяются в заводных механизмах часов. Даже в мышеловке используется упругая деформация пружины.
Еще в XVII-M веке английский физик Роберт Гук, изучая упругие свойства разных материалов, вывел закон, названный его именем. Согласно закону Гука, для упругого деформирования материала требуется приложить силу, величина которой прямо пропорциональна его деформации. Например, чтобы растянуть пружину на величину \( x \), потребуется приложить внешнюю силу \( F_{вн} \), которая равна:
где \( k \) — это коэффициент пропорциональности.
Точнее говоря, вектор деформации \( \mathbf{x} \) всегда направлен противоположно силе сопротивления пружины (или силе упругости) \( \mathbf{F} \), а потому в векторную формулировку закона Гука обычно входит знак “минус”:
Растягиваем и сжимаем пружины
В реальном мире, помимо упругих деформаций, имеются еще и пластические деформации. Так называют деформации, которые остаются в объекте, хотя бы частично, даже после прекращения действия внешних сил. Если сила не превосходит некоторой известной величины, которая называется пределом упругости, то возникающая деформация будет пластической. Предел упругости имеет разные значения для разных материалов. Если деформируемый объект, например пружина, испытывает только упругие деформации, то его называют идеально упругим, например, идеально упругой пружиной. Коэффициент пропорциональности \( k \) в законе Гука \( F=kx \) называется коэффициентом упругости объекта, который зависит от материала объекта, его размеров и измеряется в Н/м.
Допустим, вам нужно спроектировать подвеску автомобиля массой 1000 кг, состоящую из 4 пружин, которые могут идеально упруго деформироваться на расстояние 0,5 м. Каким коэффициентом упругости должна обладать пружина, чтобы выдержать вес автомобиля?
Вес автомобиля равен \( mg \), где \( g \) — это ускорение свободного падения под действием силы гравитационного притяжения. Это значит, что на каждую пружину приходится вчетверо меньшая нагрузка \( mg/4 \).
Определим упругую деформацию пружины под действием этой нагрузки по формуле закона Гука:
т.е. коэффициент упругости равен:
Подставляя значения, получим:
Итак, чтобы выдержать вес автомобиля, потребуется пружина с коэффициентом упругости равным 4,9·103 Н/м. Не забудьте, что каждый элемент подвески автомобиля должен обладать определенным запасом прочности, чтобы выдерживать непредсказуемые превышения нагрузки, например на ухабах. Однако эта задача выходит за рамки данного курса.
Изучаем особенности закона Гука
Как уже упоминалось выше, в векторную формулировку закона Гука обычно входит знак “минус”:
Таким образом, знак “минус” выражает следующую особенность упругой деформации: сила упругости всегда противоположна деформации. На рис. 12.1 схематически показаны направления силы упругости и деформации при сжатии и растяжении пружины.

Как видите, при отсутствии растяжении или сжатия нет и деформации (см. схему А на рис. 12.1). Если пружина сжимается влево, то сила упругости направлена вправо (см. схему Б на рис. 12.1), а если пружина растягивается вправо, то сила упругости направлена влево (см. схему В на рис. 12.1).
Что такое начальная фаза и как определить ее по графику колебаний
Отклоним качели на некоторый угол от равновесия и будем удерживать их в таком положении. Когда мы отпустим их, качели начнут раскачиваться. А старт колебаний произойдет из угла, на который мы их отклонили.
Такой, начальный угол отклонения, называют начальной фазой колебаний. Обозначим этот угол (рис. 7) какой-нибудь греческой буквой, например, \(\large \varphi_{0} \).
\(\large \varphi_{0} \left(\text{рад} \right) \) — начальная фаза, измеряется в радианах (или градусах).
Рис. 7. Угол отклонения качелей перед началом колебаний
Рассмотрим теперь, как величина \(\large \varphi_{0} \) влияет на график колебаний (рис. 8). Для удобства будем считать, что мы рассматриваем колебания, которые происходят по закону синуса.
Кривая, обозначенная черным на рисунке, начинает период колебаний из точки t = 0. Эта кривая является «чистым», не сдвинутым синусом. Для нее величину начальной фазы \(\large \varphi_{0} \) принимаем равной нулю.
Рис. 8. Вертикальное положение стартовой точки в момент времени t = 0 и сдвиг графика по горизонтали определяется начальной фазой
Вторая кривая на рисунке обозначена красным цветом. Начало ее периода сдвинуто вправо относительно точки t = 0. Поэтому, для красной кривой, начавшей новый период колебаний спустя время \(\large \Delta t\), начальный угол \(\large \varphi_{0} \) будет отличаться от нулевого значения.
Определим угол \(\large \varphi_{0} \) с помощью графика колебаний.
Обратим внимание (рис. 8) на то, что время, лежащее на горизонтальной оси, измеряется в секундах, а величина \(\large \varphi_{0} \) — в радианах
Значит, нужно связать формулой кусочек времени \(\large \Delta t\) и соответствующий ему начальный угол \(\large \varphi_{0} \).
Как вычислить начальный угол по интервалу смещения
Алгоритм нахождения начального угла состоит из нескольких несложных шагов.
- Сначала определим интервал времени, обозначенный синими стрелками на рисунке. На осях большинства графиков располагают цифры, по которым это можно сделать. Как видно из рис. 8, этот интервал \(\large \Delta t\) равен 1 сек.
- Затем определим период. Для этого отметим одно полное колебание на красной кривой. Колебание началось в точке t = 1, а закончилось в точке t =5. Взяв разность между этими двумя точками времени, получим значение периода.
\
Из графика следует, что период T = 4 сек.
Рассчитаем теперь, какую долю периода составляет интервал времени \(\large \Delta t\). Для этого составим такую дробь \(\large \displaystyle \frac{\Delta t }{T} \):
\
Полученное значение дроби означает, что красная кривая сдвинута относительно точки t = 0 и черной кривой на четверть периода.
Нам известно, что одно полное колебание — один полный оборот (цикл), синус (или косинус) совершает, проходя каждый раз угол \(\large 2\pi \). Найдем теперь, как связана найденная доля периода с углом \(\large 2\pi \) полного цикла.




Для этого используем формулу:
\
\(\large \displaystyle \frac{1}{4} \cdot 2\pi = \frac{\pi }{2} =\varphi_{0} \)
Значит, интервалу \(\large \Delta t\) соответствует угол \(\large \displaystyle \frac{\pi }{2} \) – это начальная фаза для красной кривой на рисунке.
В заключение обратим внимание на следующее. Начало ближайшего к точке t = 0 периода красной кривой сдвинуто вправо
То есть, кривая запаздывает относительно «чистого» синуса.
Чтобы обозначить запаздывание, будем использовать знак «минус» для начального угла:
\
Примечание: Если на кривой колебаний начало ближайшего периода лежит левее точки t = 0, то в таком случае, угол \(\large \displaystyle \frac{\pi }{2} \) имеет знак «плюс».
Примечания:
- Физики начинают отсчет времени из точки 0. Поэтому, время в задачах будет величиной не отрицательной.
- На графике колебаний начальная фаза \( \varphi_{0}\) влияет на вертикальный сдвиг точки, из которой стартует колебательный процесс. Значит, можно для простоты сказать, что колебания имеют начальную точку.
Благодаря таким допущениям график колебаний при решении большинства задач можно изображать, начиная из окрестности нуля и преимущественно в правой полуплоскости.