
Шаровый шарнир
Существуют другие виды шарнирных соединений, способные обеспечивать большее количество степеней свободы вращающихся конструкций. Соединение деталей, при котором они перемещаются вокруг общего центра, называют шаровым шарниром. Цапфа в нем изготовлена в виде сферы.

В отличие от цилиндрического, цапфа шарового шарнира обладает всеми степенями свободы. Будучи ограниченной только в своем месте положения, она обеспечивает деталям, сочлененным с ее помощью, возможность перемещения в разных направлениях.
Шаровый шарнир называют сферической кинематической парой. Корпус, вмещающий в себе шарообразную цапфу, обычно изготовлен из чугунного литья. Детали, собранные в такой узел, способны принимать положение под разными углами друг к другу. Для уменьшения трения поверхностей в шарнире цапфа специальными вкладышами защищена от соприкосновения с корпусом, заполненным смазкой. Пыльник закрывает шарнир от попадания грязи и предупреждает утечку смазки.
Все существующие механизмы изначально замечены в явлениях природы. Равно как и шаровый шарнир, очень напоминающий тазобедренные суставы и хребтовые позвонки человеческого организма.
Основные виды полуосей
Зависимо от конструкции полуось может быть полностью или частично разгруженной от действующих на нее изгибающих моментов.
Разгруженная полуось
более характерна для транспортных средств с большой грузоподъемностью, в том числе автобусов. Такая полуось на чертеже будет выглядеть свободно установленной внутри моста деталью, а опираться на балку моста будет ступица колеса с помощью двух подшипников. В данной конструкции полуось передает исключительно крутящий момент, поскольку всю силу изгибающего воздействия на себя принимают подшипники.
Виды полуосей
Полузагруженная полуось
в подавляющем большинстве случаев установлена на легковых и легкогрузовых автомобилях. Устройство полуоси данного вида отличается тем, что в ней подшипник стоит между самой полуосью и ее кожухом, причем полуось крепится непосредственно к ступице колеса. По этой причине на плече периодически возникают изгибающие моменты, которые воздействуют на полуоси в вертикальной и горизонтальной плоскостях.
На переднеприводных автомобилях для передачи крутного момента от КПП к колесам устанавливаются полуоси несколько иной конструкции. Состоит такой приводной вал из оси, внутреннего и наружного ШРУСов.
Устройство приводного вала переднеприводного автомобиля.
Разновидности механизма
В продаже встречаются самые различные фрикционные храповые механизмы. Они могут применяться для реализации самых различных задач. Среди особенностей проводимой классификации отметим следующие моменты:
- Профилированная поверхность часто изготавливается в виде барабана или рейки.
- Реечный вариант исполнения встречается крайне редко, так как функциональность устройства существенно снижается. Барабанные фрикционные храповые механизмы встречаются намного чаще по причине компактности и других свойств.
- Профиль основы также классифицируется по большому количеству признаков. Чаще всего встречаются радиальные, прямоугольные и пологе варианты исполнения. Радиальные получили широкое распространение, так как они компактные и просты в установке.
В большинстве случаев зуб имеет классическую форму, за счет чего обеспечивается надежность работы.
https://youtube.com/watch?v=GMDe6caao-Q
Шаговые электромоторы
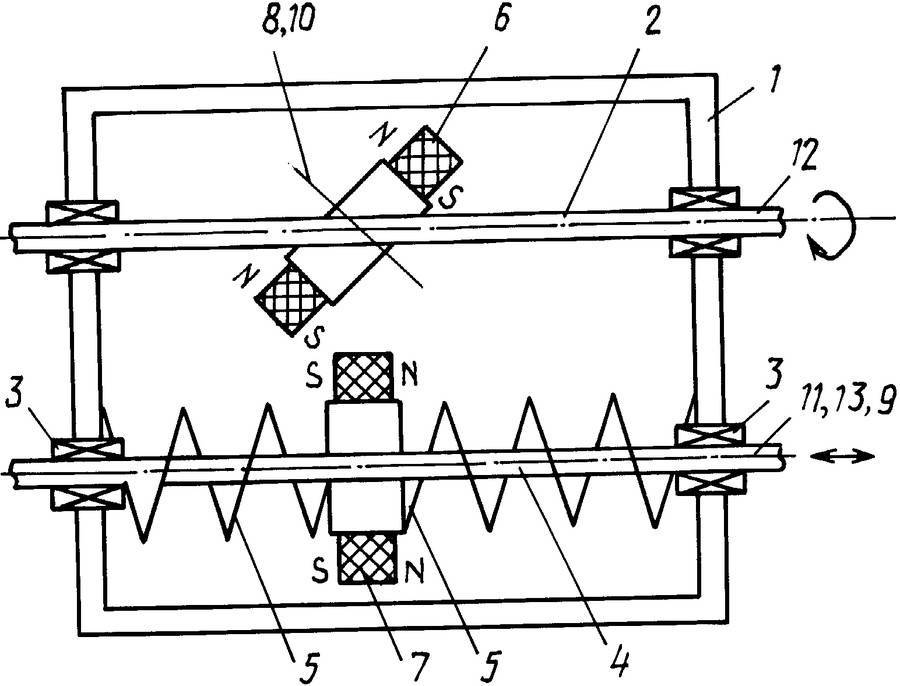
Линейные шаговые двигатели преобразуют последовательность электрических сигналов не во вращательное, а в поступательное прямолинейное движение. Они применяются в технологиях, требующих перемещения объектов в плоскости. Это могут быть двигатели для ЧПУ станков или графопостроители современных ЭВМ. Использование линейного шагового двигателя упрощает кинематическую схему эл/привода.
Плоский статор изготавливается из магнитомягкого материала. Для подмагничивания магнитопроводов устанавливаются постоянные магниты. Якорь ЛД перемещается в соответствии с принципом аналогичным мотору вращения только в прямолинейном направлении. Для этого на плоскости подвижной и неподвижной части выполнены зубцы равных размеров. В пределах одной секции бегуна линейного шагового двигателя зубцы смещены на половину своей ширины t/2, а во второй части – на четверть t/4. При этом вне зависимости от места расположения бегуна, обеспечивающего процесс подмагничивания, магнитное сопротивление будет оставаться одинаковым.
Линейные шаговые двигатели между статором и подвижной частью имеют минимальный магнитно-воздушный зазор, через который происходит взаимодействие. При этом практически отсутствует сопротивление перемещению, в результате линейный шаговый двигатель обеспечивает высокоточное позиционирование.
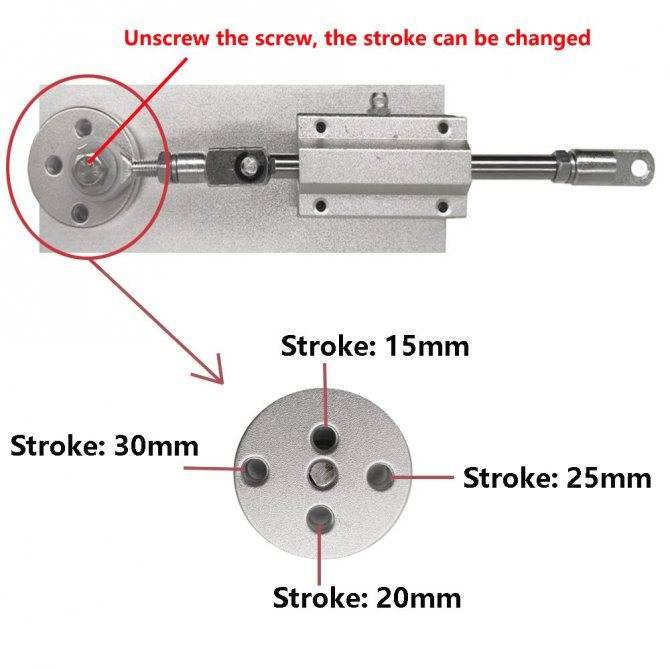
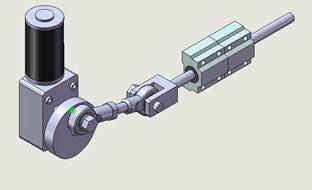
Линейный актуатор в традиционном исполнении представляет собой линейные двигатели постоянного тока, выполненные на базе коллекторных моторов. В подобных устройствах вращение преобразовывается в поступательное движение посредством редуктора, гайки и длинного винта, соединенных с выходным валом. В связи с тем, что такая конструкция не способна обеспечить точность перемещения или требуемые параметры скорости применяют электропривод с шаговым двигателем вращения, у которого вместо стандартного вала реализуется одна из следующих конструкций:
- удлиненный вал с внешней гайкой;
- выдвижной шток
- полый вал с внутренней гайкой.
Линейный шаговый двигатель или актуатор первого вида имеет в своей конструкции удлиненный вал с нанесенной на него резьбой и гайку, поступательно перемещающуюся вдоль вала. При этом сама гайка стационарна. Длина винта-вала соответствует длине хода.
Во втором случае линейный шаговый двигатель обеспечивает прямолинейное движение посредством выдвижного штока и соединенного с ним выходного вала с резьбой. Приложение внешней нагрузки производится непосредственно на шток.
Вариант полой центральной части с внутренней гайкой предусматривает установку ходового винта. Последний по мере вращения гайки движется параллельно своей оси и может выходить по обе стороны эл/мотора.
Линейные шаговые двигатели в виде актуаторов предназначены для построения систем с поступательным перемещением объектов с небольшой скоростью и высокой точностью при работе в ограниченных рабочих пространствах.
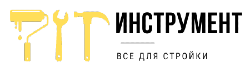
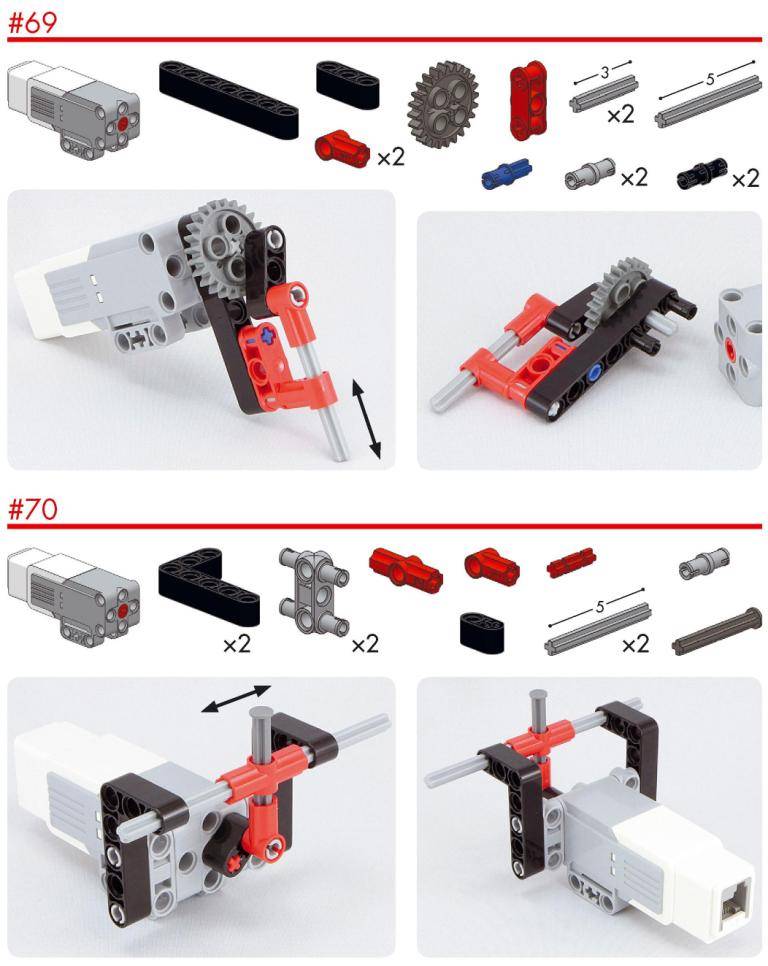
Роботы из фанеры от Clayton Boyer
Конечно, на самом деле это совсем не роботы. Я даже не знаю, как правильно их назвать. Как то вроде шагающе-катящиеся механизмы из фанеры. Но в любом случае результат довольно забавный. Давайте смотреть ближе.
Clayton Boyer известен своими кинетическими скульптурами, механизмами и часам изготовленными из фанеры. Есть у него и вот такие забавные роботы. Знакомьтесь.
Это CB Bot
Это Creepy Bot

А это Theo Bot
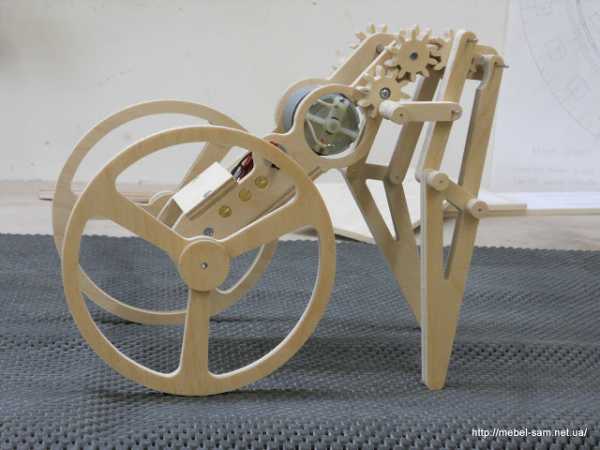
Все роботы изготовлены из фанеры. Детали этих роботов лучше вырезать из фанеры с помощью станка с ЧПУ. Каждый робот имеет смешанный опорно двигательный аппарат – колеса и «ноги». Приводятся в движение они с помощью моторчиков и батарейки на 9вольт.

Картинка хорошо, но лучше видеть в динамике.
Автор разрабатывает свои планы на продажу. Комплект чертежей в формате pdf и dxf стоит около 30-60 долл. Хороший бизнес. А те, кто их покупает, дорабатывают и украшают свои роботы. Можно добавить «глаза», раскраску, светодиоды, стилизовать под животное и т.д.
Вот что выходит



Обратите внимание, какие шестеренки использует автор в своих роботах. Они не всегда такие, к каким мы привыкли



Резюме. По сути, это детские конструкторы. У кого есть дети, те наверняка знают серию Лего Ниндзяго. Это что-то подобное, но значительно лучше. Лучше по многим параметрам. Хоть это и игрушка, но это в первую очередь механизм. Собирая ее, ребенок получит представление о конструкциях других механизмов. На примере такой игрушки он так же узнает, что такое батарейка, электромоторчик и постоянный ток. А общий вид игрушки может подтолкнуть его мыслить нестандартно. Для самых маленьких, электротягу можно заменить на резиновую тягу. В общем, если у вас есть ребенок и вы ему покупаете машинки на батарейках, а он их ломает – не спешите выбрасывать!!! Когда он подрастет, начинка этих игрушек(моторчики, проводка, светодиоды и т.д.) ему еще пригодятся. Главное подсказать и направить. Принести в дом вот такой конструктор. А сделать его на самом то деле – не так уж и сложно.
Механика приводов. Редукторы. Передаточные механизмы. Характеристики типовых упругих элементов
Лекция 1
Механика приводов
В приводе любой технологической машины имеются механические устройства, преобразующие движение выходного элемента приводного двигателя (вращательное или поступательное) в движение её исполнительного органа. Эти устройства образуют кинематические схемы машин, конкретные исполнения которых
бесконечно многообразны. Они состоят из большого
Рис.1
a- редуктор, б – зубчато-реечная передача, в – шатунно-кривошипный механизм, г –грузоподъемное устройство, д- передача винт-гайка, е – передача винт-гайка качения.(шарико-винтовая передача – ШВП)
количества различных элементов, таких как соединительные муфты, валы и оси, редукторы, рычажные механизмы, передаточные устройства, преобразующие вращательное движение в поступательное и наоборот. Примеры таких устройств показаны на рис. 1.
Статические и динамические характеристики механической системы привода оказывают существенное влияние на работу технологической машины и, в частности, на работу ее приводов. Рассмотрим некоторые параметры элементов кинематических схем, отражающие их основные свойства.
Редукторы
(рис.1-а) различных типов изменяет угловую скорость при передаче движения с на . Каждый элемент редуктора характеризуется своей угловой скоростью , ,…, а также передаточным отношением отдельных ступеней передачи, например,
, (1)
где и соответственно угловые скорости ведущего и ведомого валов.
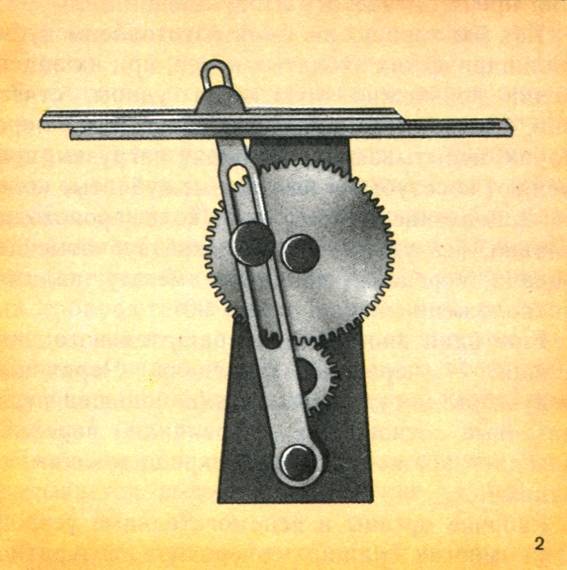
Передаточные механизмы,например, зубчато-реечная передача (рис.1-б),грузоподъёмное устройство (рис. 1- г),передачи винт гайка и винт – гайкакачения (рис.1 д и е) преобразует вращательное движение шестерни с угловой скоростью в поступательное движение рейки с линейной скоростью V. При этом передаточное отношение
(2)
называют радиусом приведения линейной скорости V к валу со скоростью вращения . В отличие от передаточного отношения редуктора (коэффициента редукции) передаточное отношение имеет размерность .
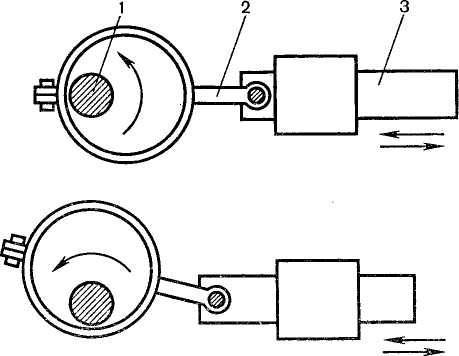
Шатунно-кривошипный механизм
(рис. 1-в) преобразует вращательное движение кривошипа с постоянной скоростью в возвратно-поступательное движение ползуна с переменной линейной скоростью V(t).
Характеристики типовых упругих элементов.
При нагружении многие элементы кинематических цепей подвергаются упругим деформациям, в результате чего механическая часть привода не может всегда рассматриваться как абсолютно жесткое тело. В кинематических цепях наиболее податливыми являются элементы передаточных устройств, характеристики которых рассматриваются ниже. Однако полученные характеристики могут быть использованы и для других устройств кинематических цепей.
Вал, работающий на кручение
(рис.2-а), характеризуется углом закручивания
, (3)
где М — приложенный к валу вращающий момент, — длина вала, G – модуль упругости второго рода, — полярный момент инерции сечения вала.
Коэффициент жесткости определяется отношением
, êï. (4)
Растягиваемый или сжимаемый стержень
(рис.2-б) к которому приложена сила F, имеет следующее значение жесткости (ньютон на метр)
, ïê (5)
где — линейная деформация стержня, — Модуль упругости первого рода, S – площадь стержня.
Цилиндрическая зубчатая передача.
При закрепленной ступице ведущего колеса 1 приложим момент к колесу 2 (рис.2 -в). Вследствие деформации зубьев колесо 2 повернется на угол . Таким образом, жесткость передачи может быть определена по формуле (4). Однако в этом случае жесткость следует считать приведенной к оси колеса 2 ( можно и к оси колеса 1). Таким образом
. (6)
Так как
то . (7)
Итак, жесткость, приведенная к оси ведомого колеса 2, в раз больше жесткости, приведенной к оси ведущего колеса 1.
Ременные и цепные передачи
(рис.2-г). Если жесткость ремня или цепи на растяжение, то при повороте ведомого звена 2 на угол и закрепленном ведущем звене 1 в натянутой ветви возникает сила где — радиус ведомого звена.
Отсюда находим: , (8)
где — жесткость, приведенная к оси ведомого звена; — коэффициент вида передачи. Для ременной передачи для цепной передачи
По формуле (8) можно определить жесткость канатов в барабанных передачах грузоподъемных устройств, канатных дорог и других подобных устройств, где принимают
Соединительные муфты
являются неотъемлемой частью всех передаточных устройств. Они делятся не жесткие, полужесткие и упругие. С помощью муфт осуществляется не только механическое соединение





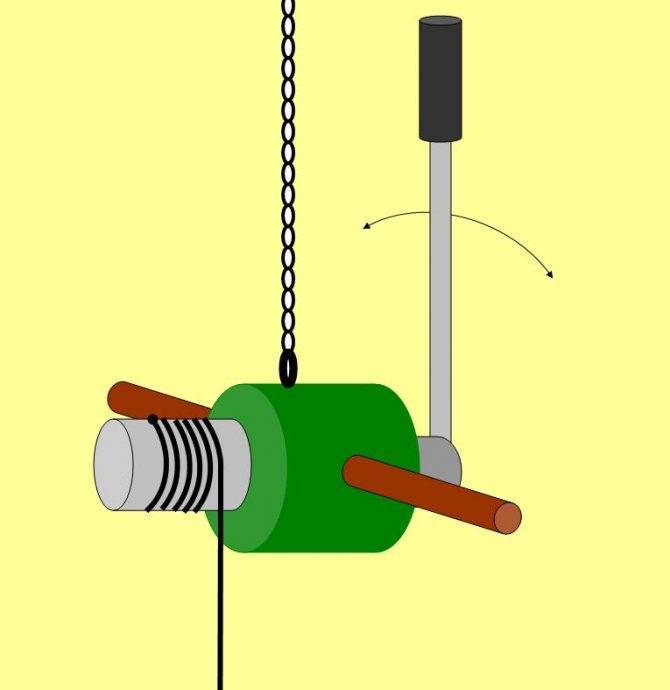
Типы подъемных устройств
Существует большое разнообразие подъемных механизмов. К тяжелой категории можно отнести машины, предназначенные для поднятия грузов разной тяжести. С их помощью можно перемещать как промышленное, так и бытовое оборудование.
Незаменимым в гараже будет подъемник, с помощью которого можно двигать груз, подвешенный на крюке.
Спроектировать подъемник можно самостоятельно. Перед самостоятельным изготовлением нужно ознакомиться с типами устройств и их функциональными возможностями. При классификации учитывают различные признаки: принцип действия, назначение, тип привода.
Устройства и их типы:
- Блок. Тип ручного механизма, который приводит в действие сила мускулов человека.
- Домкрат. Является простым рычажным устройством, которое используют для того, чтобы поднять одну сторону автомобиля.
- Таль. Является ручным или механизированным приспособлением, которое состоит из блоков, связанных между собой.
Также можно сделать специальные нестандартные установки. Тельфер является усовершенствованной талью, которую оборудуют электрическим приводом. Элементарным приспособлением является журавль, который работает по принципу рычага.
Схема подключения автоматики привода для откатных ворот
Схема подключения автоматики для ворот
Двигатель фиксируют перед подсоединением автоматики.
Схематичный порядок работ:
- соединение зубчатой планки и шестеренок мотора;
- введение в работу торцевых выключателей;
- регулировка перемычек на адаптере управления;
- включение питания;
- настройка дистанционного пульта;
- наладка концевых реле и времени;
- подсоединение к схеме периферийных приборов (сигнальных ламп и фотоэлементов).
В случае самостоятельного подключения автоматики нужно вначале собрать схему на столе, затем перенести практические навыки в реальные обстоятельства
Важно выбрать регламент правильного срабатывания концевых выключателей
Механические торцевые реле фиксируют болтами, чтобы они не слишком сжимали спираль.
Фотоэлементы ставят напротив друг друга на столбах. Передатчик к ним подключают двухжильным проводом, а приемник — четырехжильным. Сигнальную лампу подсоединяют к клеммам управляющего блока так, чтобы лицевая часть была обращена к дороге.
Электропривод
В качестве двигателей электропривода чаще всего применяют односкоростные асинхронные электродвигатели переменного тока с короткозамкнутым ротором. Асинхронная машина включается в трехфазную сеть, поэтому она должна иметь на статоре три фазные обмотки, создающие вращающееся магнитное поле, которое увлекает за собой ротор. Ротор вращается асинхронно, т. е. со скоростью, отличной от скорости поля. Обладая жесткой характеристикой (зависимостью крутящего момента от числа оборотов), эти двигатели обеспечивают постоянство мощности во всем диапазоне скоростей и незначительное изменение числа оборотов вала под нагрузкой.
Применение асинхронных электродвигателей с электрическим переключением скоростей путем изменения числа пар полюсов значительно упрощает коробки передач. Однако асинхронные электродвигатели с переключением скоростей обладают постоянным моментом на разных скоростях, что снижает их эффективность при малых оборотах.
Характерной частью большой группы электрических машин является коллектор — полый цилиндр, собранный из изолированных друг от друга медных колец. Наличие коллектора у машин переменного тока позволяет подвести фазы к ротору. Асинхронные электродвигатели с фазным ротором применяются для механизмов с плавным, ступенчатым пуском в тяжелых условиях при продолжительном режиме работы.
Использование электродвигателей постоянного тока, частоту вращения которых в достаточно широких пределах можно регулировать (при постоянной мощности в определенном диапазоне скоростей) изменяя поле возбуждения, оказывается более предпочтительным, т. к. значительно упрощает коробку передач.
В двигателях постоянного тока коллектор обеспечивает постоянный по направлению вращающий момент. Область применения коллекторных машин, в особенности машин постоянного тока, достаточно обширна, а наличие простых и малогабаритных выпрямительных устройств позволяет подключать их к сетям переменного тока. Особенно ценное свойство коллекторной машины постоянного тока — возможность плавного (бесступенчатого) регулирования частоты вращения ротора.
Синхронной называется электрическая машина, скорость вращения ротора которой связана постоянным отношением с частотой сети переменного тока, в которую эта машина включена. Синхронные электродвигатели целесообразны в тех случаях, когда необходим двигатель, работающий при постоянной скорости. У синхронных двигателей КПД несколько выше, а масса на единицу мощности ниже, чем у асинхронных двигателей, рассчитанных на ту же частоту вращения.
Для осуществления вспомогательных движений нередко используют электромагниты.
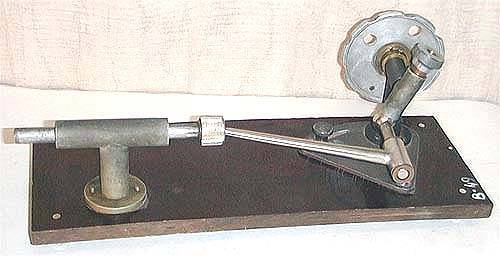
Возвратно-поступательный механизм собственными руками
Значительно сэкономить можно путем создания возвратно-поступательного механизма собственными руками. В большинстве случаев его производят из дрели, в прочих для передачи вращающего крутящего момента применяется электро двигатель.
Характерностями назовем приведенные ниже моменты:
- Большинство конструкций собственными силами сделать не выходит, так как требуемые детали отличаются высокой сложностью. Примером можно назвать комбинирование кривошипного вала и шестерни.
- В любых ситуациях должны делаются расчёты, так как в другом случае обеспечить требуемые параметры не выходит.
- Сделать конструкцию рассматриваемого типа возможно лишь при наличии особенного оборудования. Если устройство сделано самостоятельно, то его настоящие параметры от расчетных могут значительно различаться.
В общем необходимо заявить, что рассматриваемая задача довольно трудна в применении. Собственно поэтому работу должны проводить исключительно профессионалы, которые могут провести непростые расчеты, а еще сделать требуемые детали.
Требования безопасности
При проектировании и монтаже рычажного механизма учитываются требований безопасности. Они во многом зависят от области применения устройства, а также особенностей самого механизма.
Среди особенностей этого момента можно отметить следующее:
- При изготовлении должен подбираться материал, который будет соответствовать всем требованиям. Примером можно назвать высокую коррозионную стойкость. При проектировании указывается то, какой именно материал должен применяться при изготовлении устройства. Часто отдается предпочтение углеродистой стали и легированным сплавам. Некоторые элементы могут быть изготовлены из уплотнительных и других материалов, все зависит то конкретного случая.
- При проектировании учитывается то, каким образом происходит перераспределение нагрузки. Это связано с тем, что в некоторых местах она будет критической.
- Под активным элементом при подъеме тяжелых объектов не должно находится людей, другого оборудования, а также частей самого рычажного механизма. Это связано с высокой вероятностью падения переносимого груза.
- Перед непосредственным применением оборудования следует проводить визуальный осмотр, который позволяет определить наличие или отсутствие повреждений. Кроме этого, должно проводится периодическое обслуживание. Даже незначительный дефект может стать причиной существенного снижения прочности рычажного механизма. Периодическое обслуживание позволяет существенно продлить срок службы устройства.
- Запрещается применять механизм не по предназначению. Перед каждым его использованием проверяется надежность крепления. Нагрузка должна оказываться на конструкцию соответствующим образом, так как в противном случае происходит неправильное перераспределение силы. Именно поэтому при проектировании указывается то, каким образом устройство должно устанавливаться и как использоваться.
- При применении учитывается то, на какую максимальную нагрузку рассчитано оборудование. Слишком высокий показатель может стать причиной, по которой происходит повреждение основных элементов. При проектировании учитывается то, какая нагрузка может оказываться на конструкцию.
Как правило, соответствующее руководство по применению устройства составляется непосредственно на месте его эксплуатации в соответствии с установленными нормами. Это связано с тем, что рычажные механизмы получили весьма широкое распространение, могут устанавливаться в качестве составного узла другого оборудования.
При этом узел оборудован тремя важными независимыми системами:
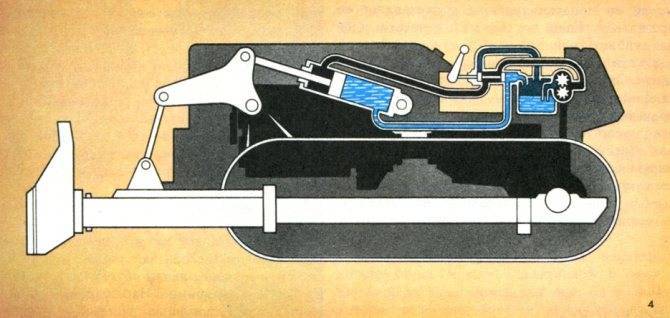
- Гидравлическая. Эта часть устанавливается в большинстве случаев для передачи усилия. Гидравлика получила весьма широкое распространение, так как она предназначена для непосредственной передачи усилия. Гидравлическая часть основана на подаче специальной жидкости, при помощи которой проводится передача усилия. Гидравлика несет с собой опасность по причине того, что подвижный элементы могут передавать усилие. Поэтому все основные элементы должны быть защищены от воздействия окружающей среды, для чего проводится установка различных кожухов.
- Механическая. Механика отвечает за непосредственную передачу усилия и достижения других целей. Неправильная работа устройства может стать причиной повреждения и деформации. Механика также защищается специальными кожухами, так как попадание посторонних элементов запрещается.
- Электрическая. Для управления механизмом проводится установка электрической части. Она должна быть защищена от воздействия окружающей среды, так как даже незначительное механическое воздействие может стать причиной повреждения магистрали электроснабжения.
Опасность с собой несет и электрическая часть, которая состоит из конечных выключателей. Схема подключения предусматривает использование как минимум двух выключателей, устройство должно обесточиваться в случае выхода из строя одного из них.
Механическая система защиты действует путем прерывания подачи масла в гидравлический цилиндр. При этом проводится слив масла с цилиндра в общую емкость. Подобная система срабатывает даже при незначительном повреждении устройства.
Как сделать фундамент мельницы
Чтобы вашу красивую конструкцию не украли темной ночью, нужно выполнить мельницу на надежном и прочном фундаменте.
Самый простой вариант – металлическая планка, на которую устанавливается мельница, залитая в бетон на глубине 2 штыков лопаты под землей. Такую конструкцию можно только сломать, но никак не унести. Если беспокоиться о безопасности не приходится (во дворе собака или охрана), то можно обойтись без фундамента, выполнив основание мельницы на деревянных ножках с пластиковыми наконечниками. В качестве таких наконечников можно с легкостью использовать трубу ПВХ подходящего диаметра. Дерево и пластик скрепляются между собой при помощи саморезов.

Для чего нужен вибромотор?
Базой каждой виброустановки является электровибрационный мотор. Установка может понадобиться не только для производства бетона , но и для просеивания сыпучих стройматериалов. В зависимости от поставленных целей избираются ключевые характеристики, согласно которым нетрудно сделать вибродвигатель своими руками.
Существует 2 вида вибромоторов:
для уплотнения бетона;
- для производства изделий из бетона.
Если планируется использование вибромотора в больших масштабах, то выгоднее купить уже готовый – с завода. Он будет обладать всеми характеристиками для надежной работы. В случае так называемого единоразового использования, например, для возведения дачного домика, вибромотор изготовленный своими руками станет прекрасным решением.
Для высокочастотных вибромоторов нужна устойчивая установка из прочной и толстой стали. При перенагрузке, конструкция быстро поддается деформации
Важно учитывать цикличность работы установки. Если оборудование будет работать часто и при высоких нагрузках, необходимо устанавливать двигатель с частотой больше 1500 оборотов в минуту
Как сделать лопасти для мельницы
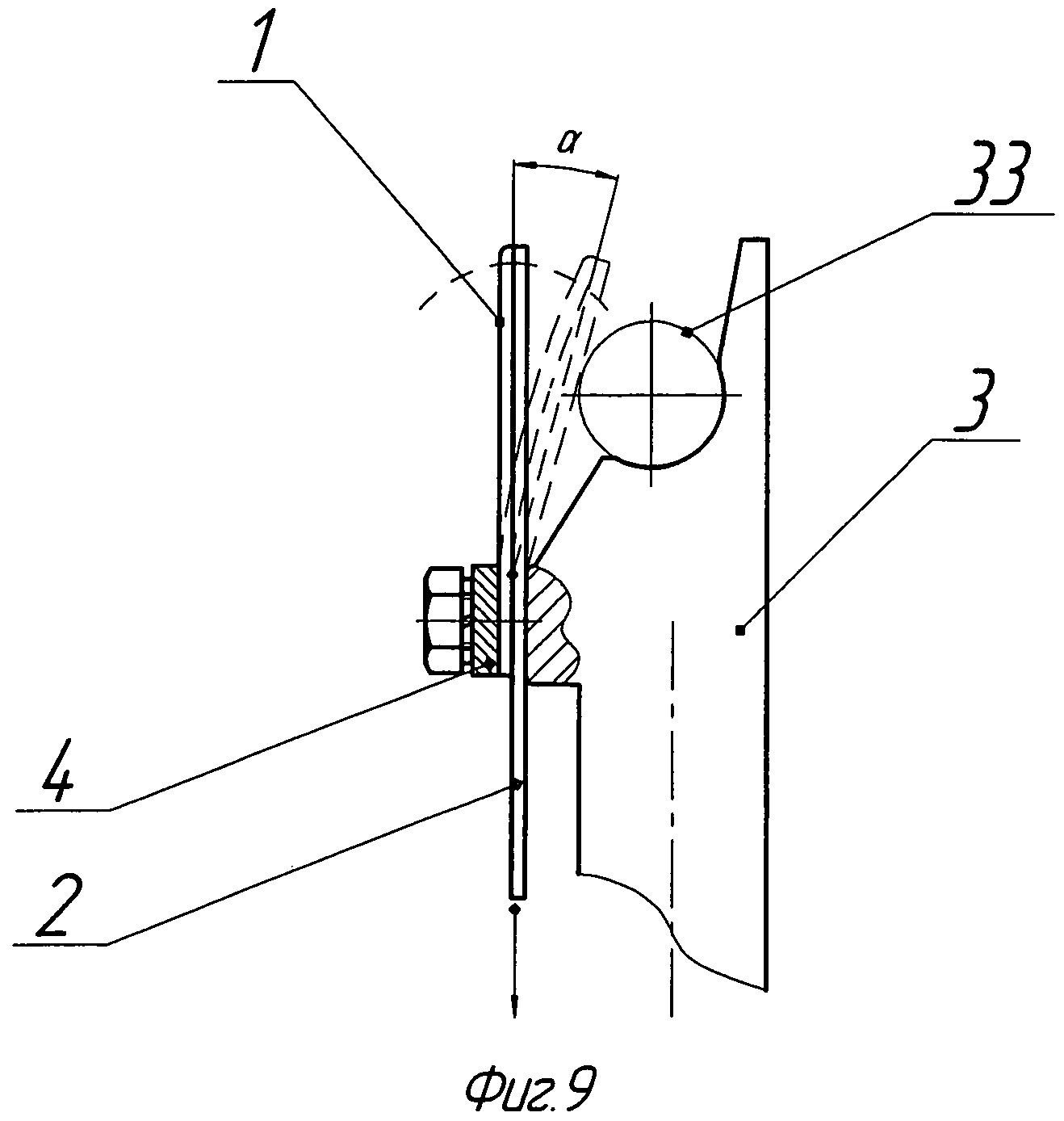
Лопасти для мельницы делаются очень просто – под наклоном примерно в 15 градусов они располагаются по кругу. Лопасти можно сделать, как из дерева. Так и из любого другого прочного материала с большой площадью. Под действием потока ветра лопасти начнут вращаться лишь в том случае, если правильно ориентированы. Лопасти должны быть, как бы развернуты наружу при монтаже.




Итак, теперь вы знаете, как сделать мельницу для сада, сделать это максимально быстро, эффективно и с минимальными временными и материальными затратами. Надеюсь, мои советы оказались полезны и вы без труда сделаете мельницу своей мечты для приусадебного участка любой площади.
Функциональное предназначение и устройство
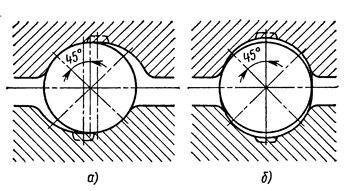
Вид профиля впадины винт-гайка: а) арочный контур б) радиусный контур
Цель рассматриваемого механизма состоит в том, чтобы преобразовать вращательное движение привода в прямолинейное перемещение рабочего объекта. Передача состоит из двух составных частей: ходового винта и гайки.
Винт изготавливается из высокопрочных сталей марок 8ХФ, 8ХФВД, ХВГ, подвергнутых индукционной закалке, или 20Х3МВФ с азотированием. Резьба выполнена в форме спиральной канавки полукруглого или треугольного сечения. В зависимости от условий работы винта профиль впадины может иметь несколько исполнений. Наиболее часто применяется арочный или радиусный контур.
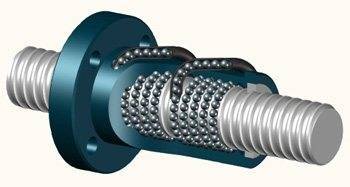
Охватывающая деталь — гайка является составным узлом. Она имеет сложное устройство. Обычно представляет собой корпус, в котором расположены два вкладыша с такими же канавками, как и у ходового винта. Материал вкладных деталей: объемно закаливаемая сталь марки ХВГ, цементируемые стали 12ХН3А, 12Х2Н4А, 18ХГТ. Вставки устанавливают таким образом, чтобы после сборки обеспечить предварительный натяг в системе винт-гайка.
Внутри винтовых канавок размещаются закаленные стальные шарики, изготовленные из стали ШХ15, которые при работе передачи циркулируют по замкнутой траектории. Для этого внутри корпуса гайки имеются несколько обводных каналов, выполненных в виде трубок, соединяющих витки гайки. Длина их может быть различной, то есть шарики могут возвращаться через один, два витка, или в конце гайки. Наиболее распространенным является возврат на смежный виток (система DIN).
Часовой механизм поворота
Устройство часового механизма поворота в основе своей довольное простое. Для того чтобы создать такой принцип работы, нужно взять любые механические часы и соединить их с двигателем солнечной батареи.
Для того чтобы заставить работать двигатель, необходимо установить один подвижный контакт на длинную стрелку механических часов. Второй неподвижный закрепляется на двенадцати часах. Таким образом, каждый час, когда длинная стрелка будет проходить через двенадцать часов, контакты будут замыкаться, и двигатель будет поворачивать панель.
Временной промежуток в один час, выбран исходя из того, что за это время солнечное светило проходит по небу около 15 градусов. Установить еще один неподвижный контакт можно на шесть часов. Таким образом, поворот будет проходить каждые полчаса.
Источник